Project
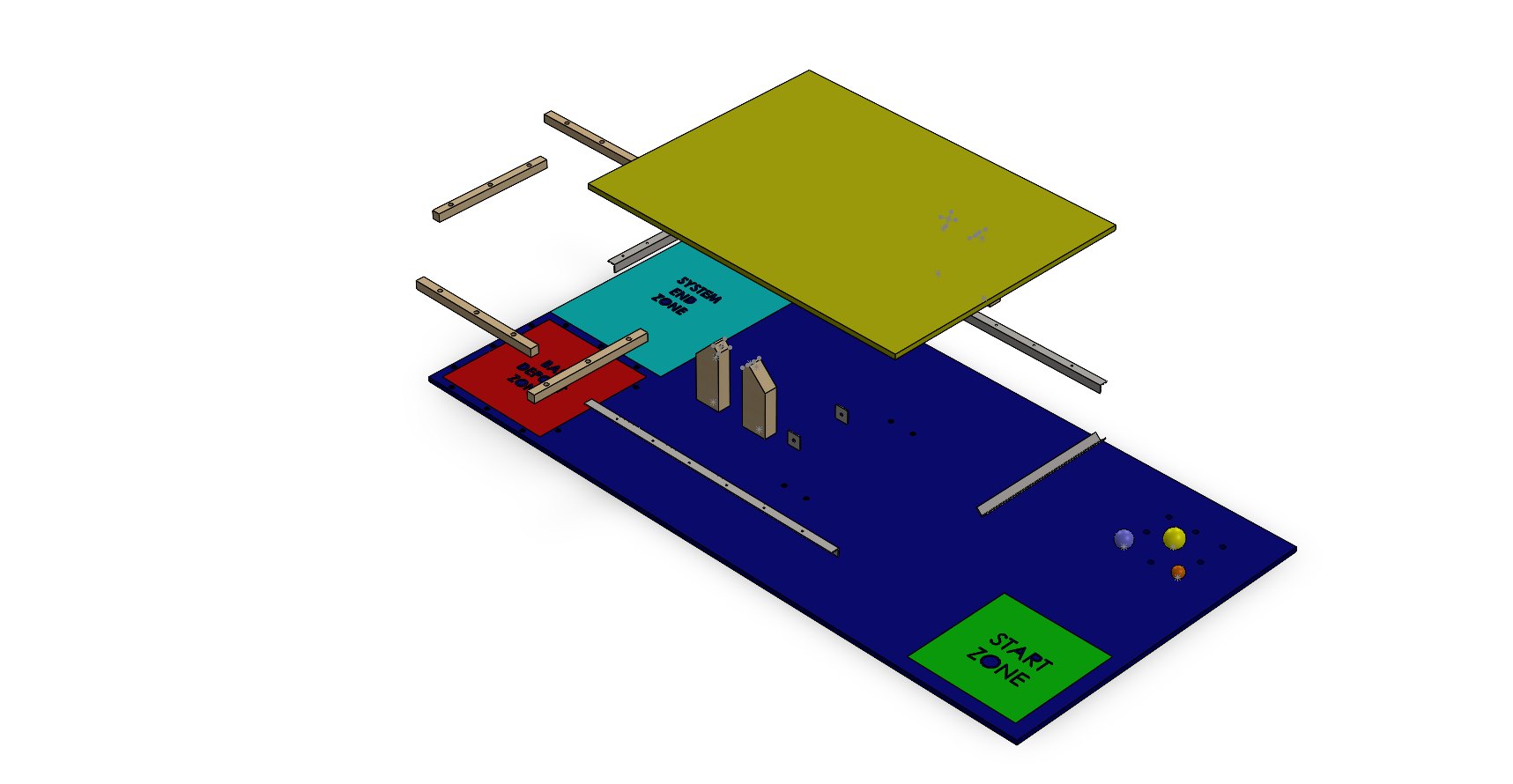
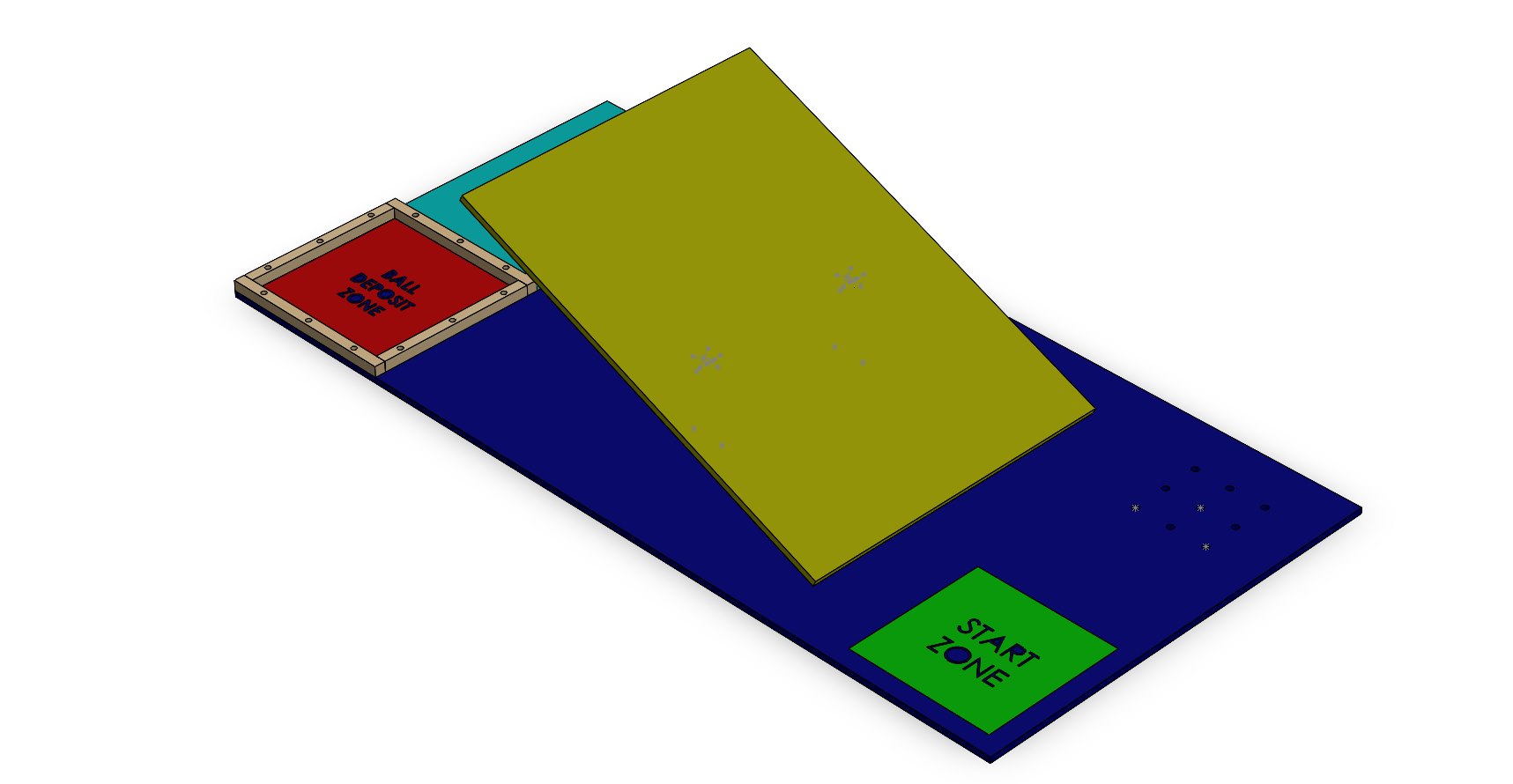
Warman Challenge Robot
Robot mechanism design for a Warman subsystem, focused on ball retention, servo-actuated release gates and flaps, retainer geometry, tolerance-sensitive fit, CAD iteration, and prototype review.
Warman Challenge robot page showing mechanism design, CAD iteration, ball-retainer assemblies, servo-actuated release concepts, prototype visuals, and test-planning material.