Project
Cobot Prototyping Platform
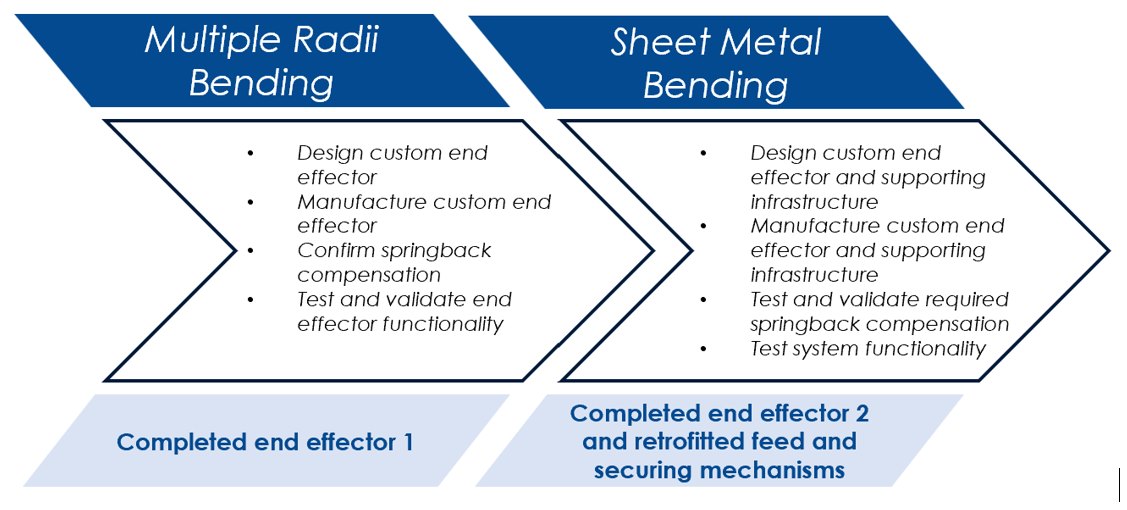
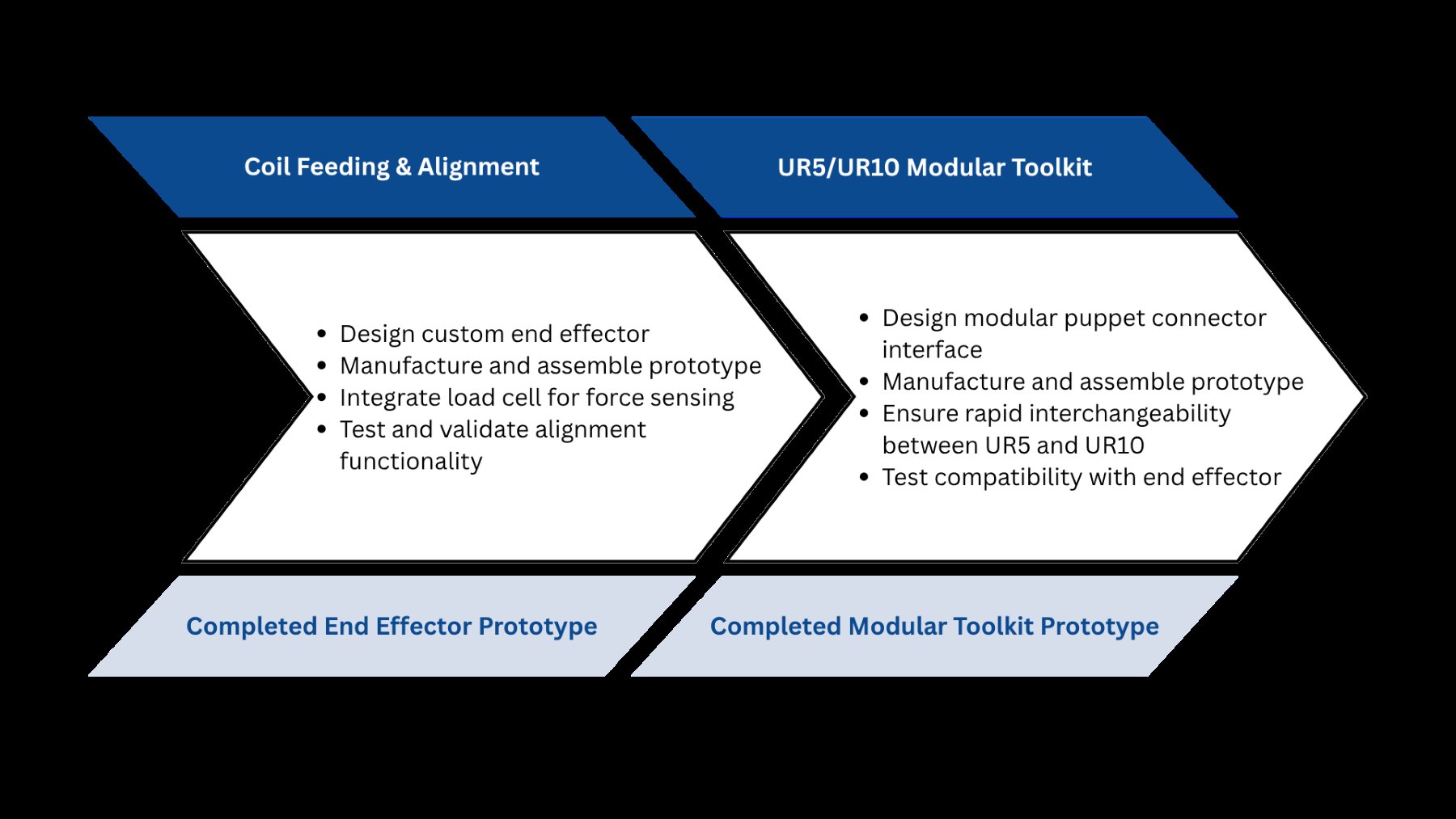
Low-cost cobot test platform built around a modular kinematic puppet, with interchangeable end-effectors, connectors, bases, CAD iteration, and physical prototypes.
Modular robot-skeleton concept for low-cost cobot prototyping, using morphology tables, weighted decision matrices, CAD, and physical prototypes to compare end-effector, connector, and base options.